Encoder Emulation
Encoder Emulation
Emulated encoder allows the AKD2G to output encoder like signals which follow the position from one of the different feedback inputs. The output can have a different resolution or be a different type compared to the input. For example, the source could be an SFD and the output could be an incremental encoder.
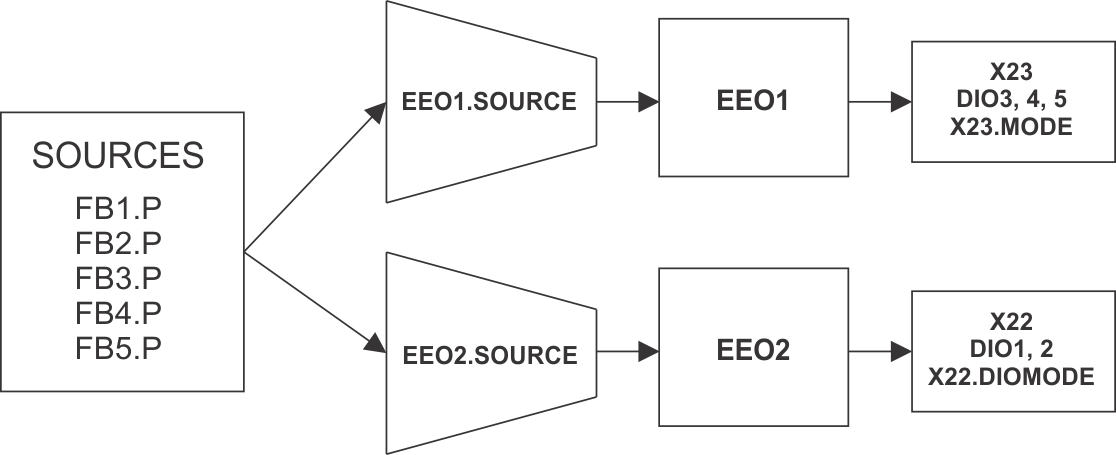
Each EEO (Emulated Encoder Output) unit is associated with a connector. You may need to set the mode of the connector to the X23.MODE or X22.DIOMODE to force the EEO signals to be output from the connector.
When using Q quad B mode, EEO#.MODE 0, the maximum speed that can be generated is

When using cw/ccw or step/dir modes, EEO#.MODEs 1 or 2, the maximum speed that can be generated is

Keywords
| Keyword | Description |
|---|---|
| EEO#.SOURCE | Which position source to use to drive the EEO generator. |
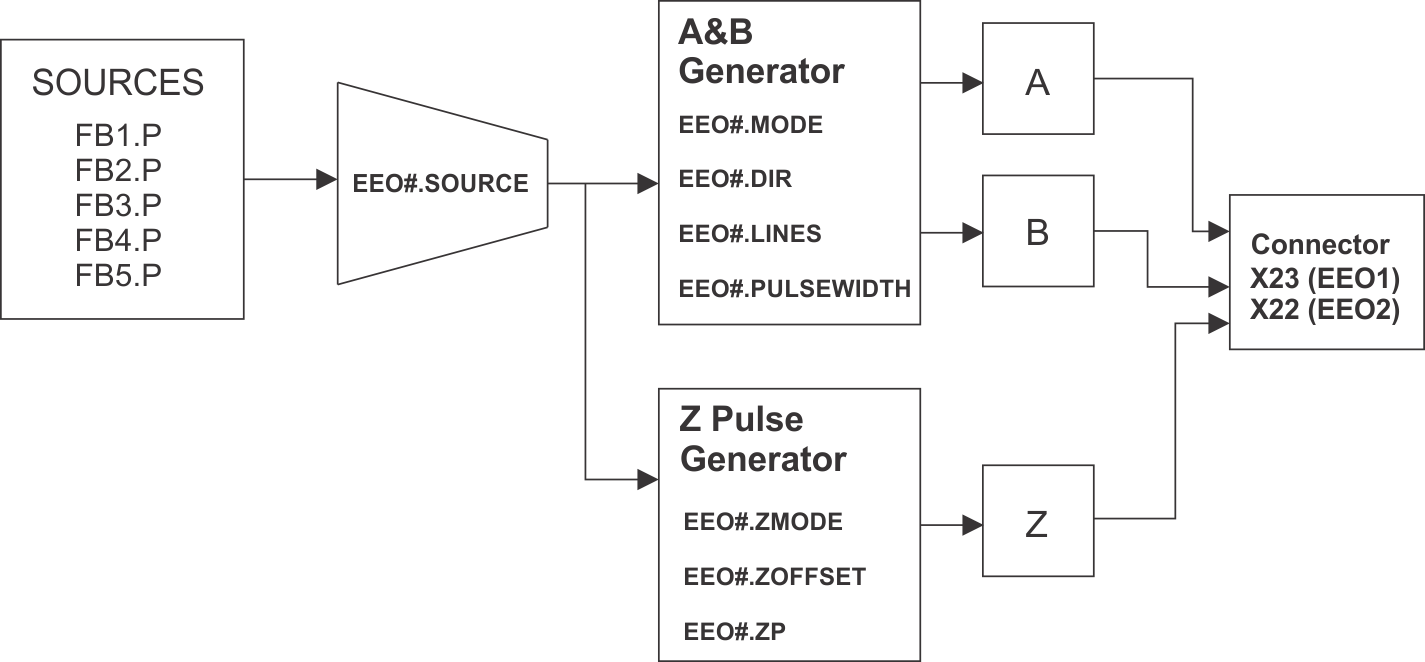
| EEO#.MODE | The type of output waveform an EEO generator will create. |
| EEO#.ZMODE | The type of Z pulse an EEO generator will create. |
| EEO#.DIR | The direction of the output with respect to the source. |
| EEO#.LINES | How many lines are output for one revolution of the source. |
| EEO#.PULSEWIDTH | The pulse width of the pulses from the CW/CCW and step/dir modes. |
| EEO#.ZOFFSET | The position of the one pre rev Z pulse. |
| EEO#.ZP | The position of the absolute Z pulse. |
| X23.MODE | Selects how the X23 connector is used. |
| X22.MODE | Selects how the X22 connector is used. |
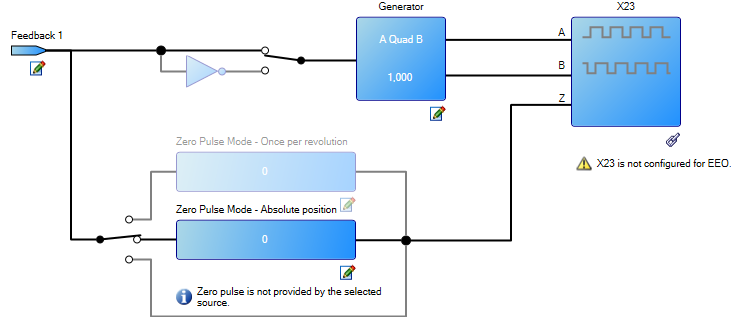
Encoder Emulation View
| Element | Property | Description | Parameter | |
|---|---|---|---|---|
| Encoder Emulation Source |

|
Feedback source |
This parameter sets the position source used to drive the EEO generator. 1 – Feedback1 2 – Feedback 2 3 – Feedback 3 4 – Feedback 4 5 – Feedback 5 |
|
| EncoderEmulation Output Generator |
|
Mode |
This parameter specifies the type of output waveform an EEO generator will create. 0 – A Quad B 1 – CW/CCW 2 – Step/Direction |
EEO#.MODE |
| Lines | Sets how many lines are output for one revolution of the source feedback. | EEO#.LINES | ||
| Pulse |
Set the pulse width from the CW/CCW and step/dir mode signals. | EEO#.PULSEWIDTH | ||
| X23 |
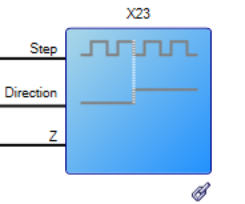
|
Describes the signals send to the respective connector, the link will take you to theHardware Configuration. | ||
| Configure ZeroPulse |
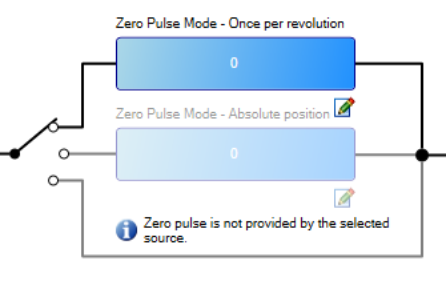
|
ZeroPulse Mode - Once per revolution | This parameter sets the position within each revolution where the Z pulse will be generated, when the one Z pulse per rev mode is selected (EEO#.ZMODE 0) | EEO#.ZOFFSET |
| Zero Pulse Mode - Absolute position | This parameter sets the position of the Z pulse when the absolute Z pulse mode is selected (EEO#.ZMODE 1). | EEO#.ZP |
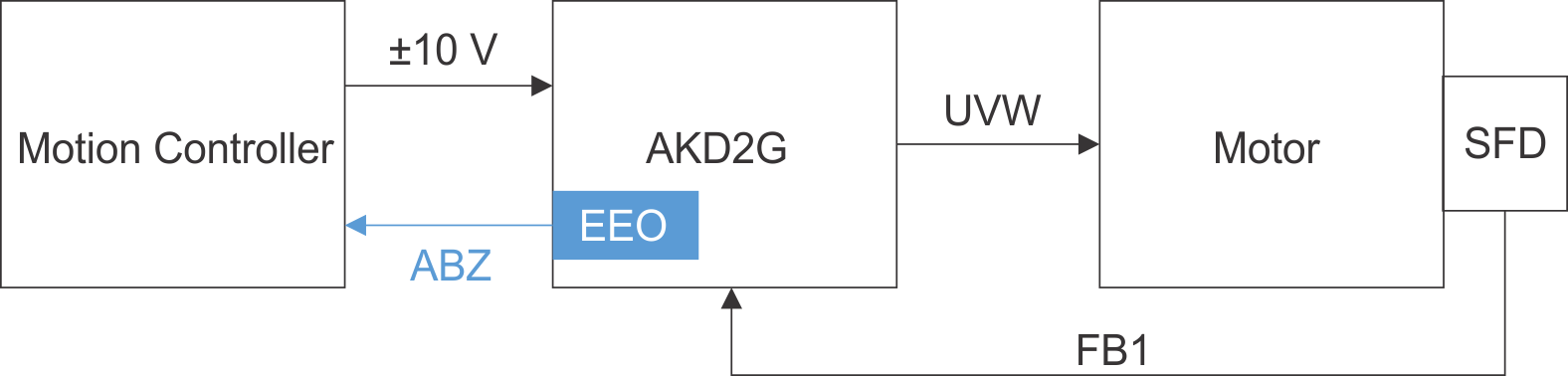
Position Feedback to an Analog Controller
EEO is commonly used when the AKD2G is replacing a simpler drive that was being controlled by a motion controller using a ±10V velocity or torque![]() Torque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist command. The motion controller is typically closing the position or velocity loop and need the ABZ encoder signals for the feedback to its loops. EEO allows the motor to use a modern feedback like SFD connected to the drive and then output the emulated encoder outputs that are passed to the motion controller.
Torque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist command. The motion controller is typically closing the position or velocity loop and need the ABZ encoder signals for the feedback to its loops. EEO allows the motor to use a modern feedback like SFD connected to the drive and then output the emulated encoder outputs that are passed to the motion controller.
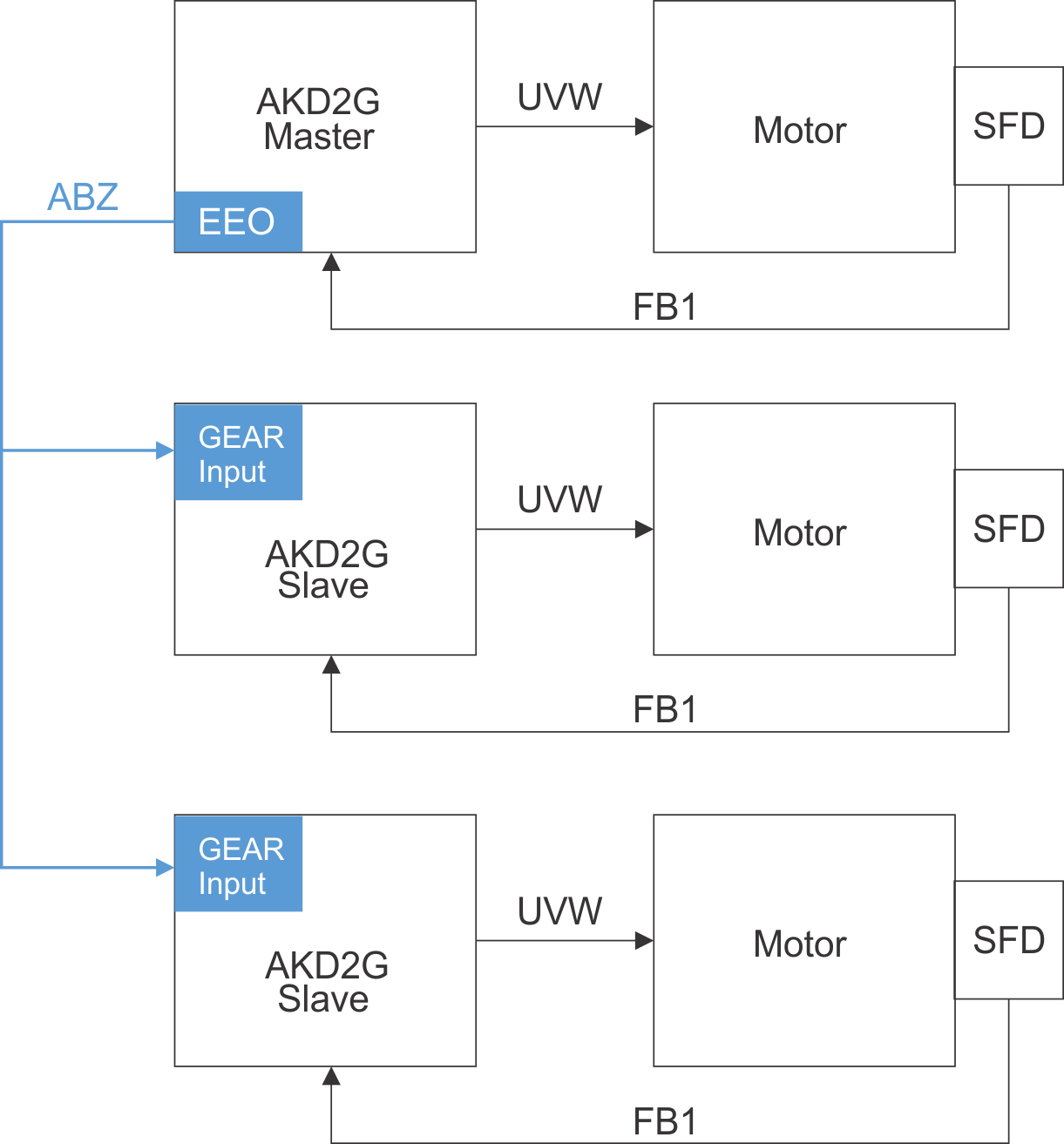
Master in a Master/Slave System
EEO can be used to synchronize several slave axes with a position from the master axis. Each slave axis would be able to coordinate its motion with functions like Electronic Gearing.